Reinforcement Learning for Search and Grasp in Clutter
Engineering honours thesis project on the application of Reinforcement Learning to enable robotic manipulators to navigate and acquire target objects in cluttered and unstructured environments.
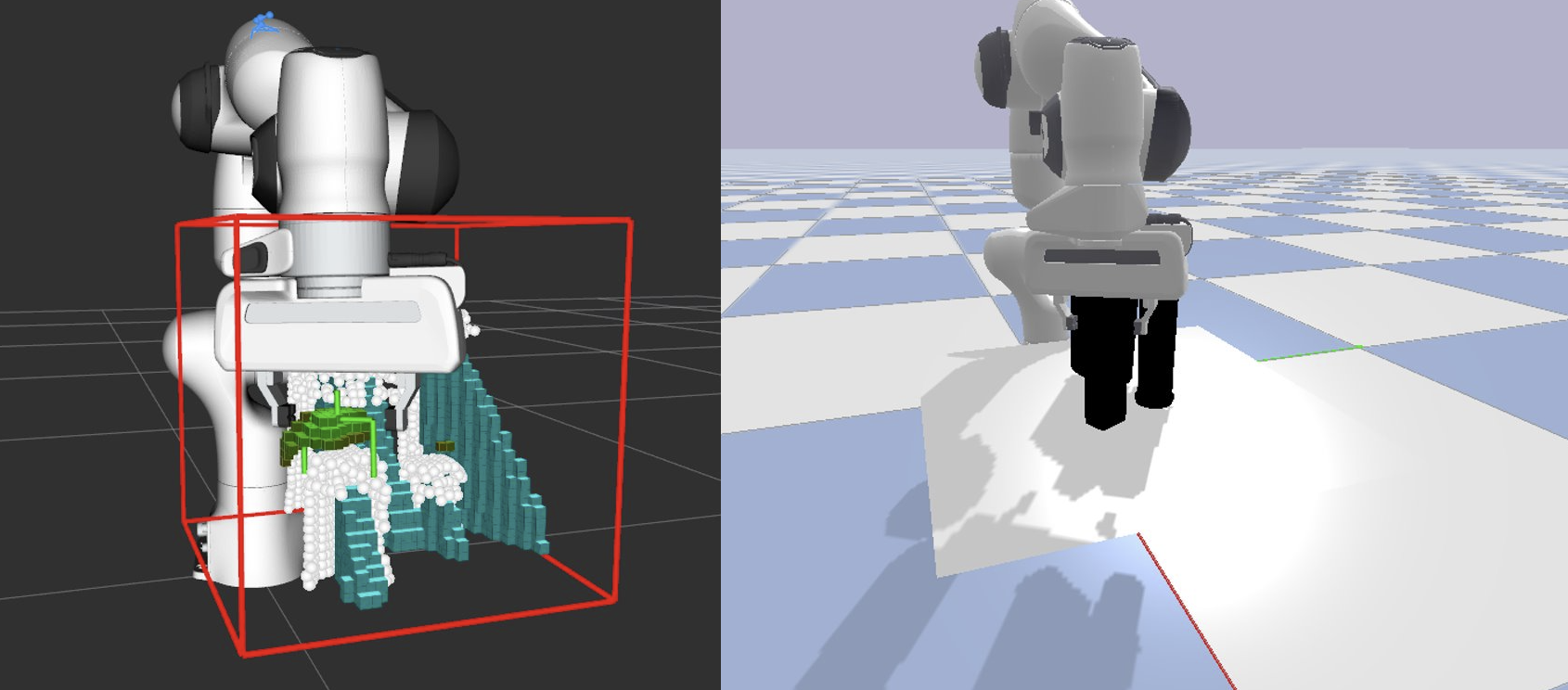
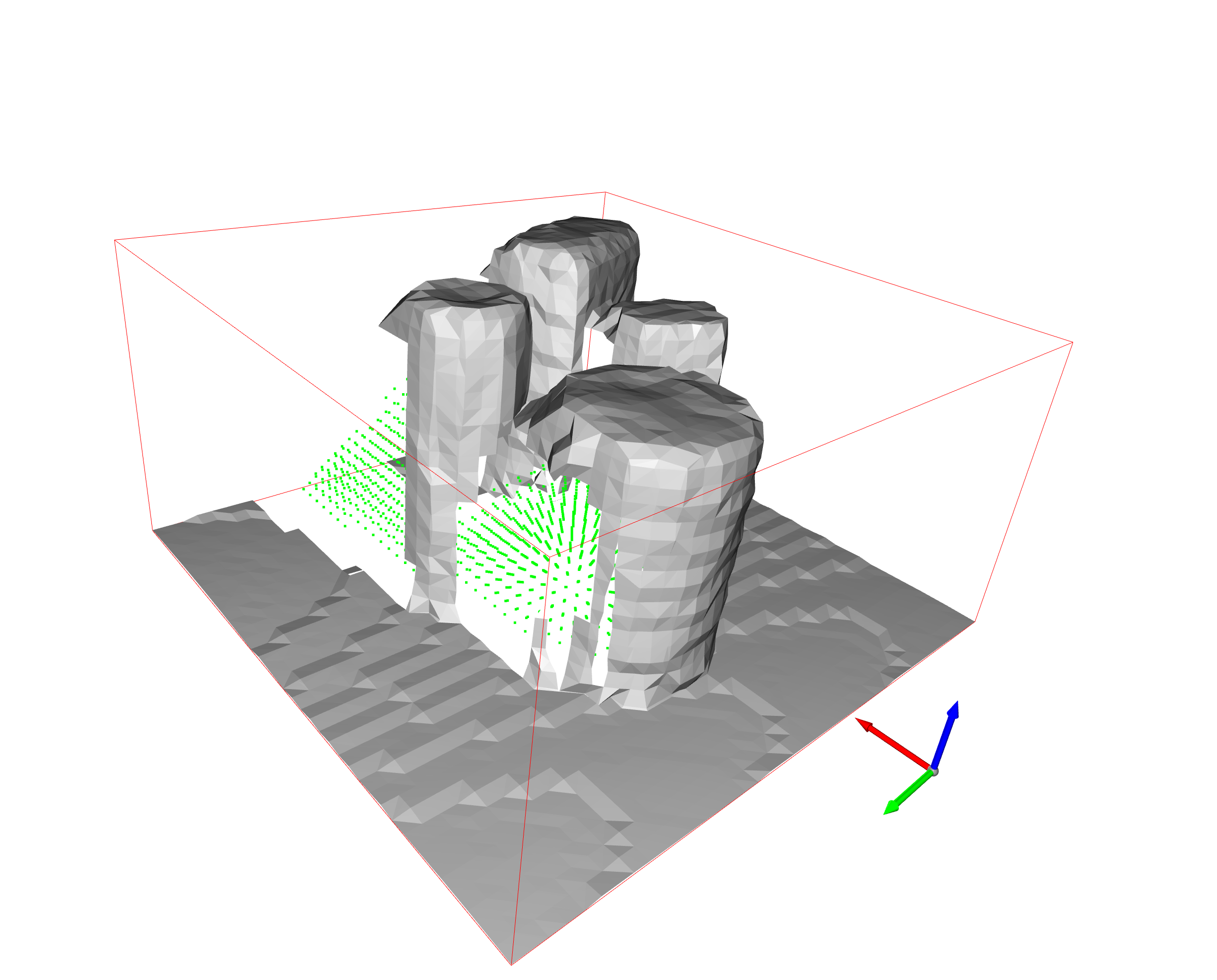
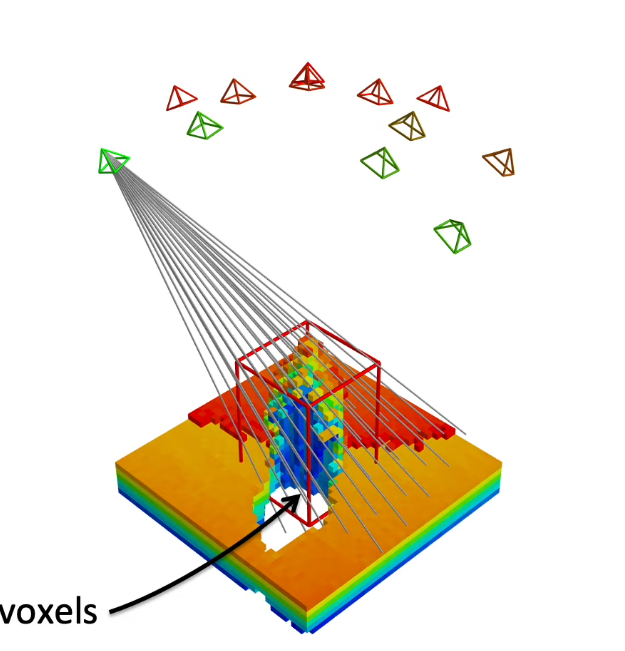
Applying deep Reinforcement Learning to point cloud data from an Intel RealSense depth camera mounted on a Franka Panda robotic arm within UQ Robotics Perception Planning and Leaning lab under the supervision of Prof. Jen-Jen Chung.
Presented this work on multiple occasions to senior staff and company representatives resulting in funding and further projects for the lab.
Tractor Pull
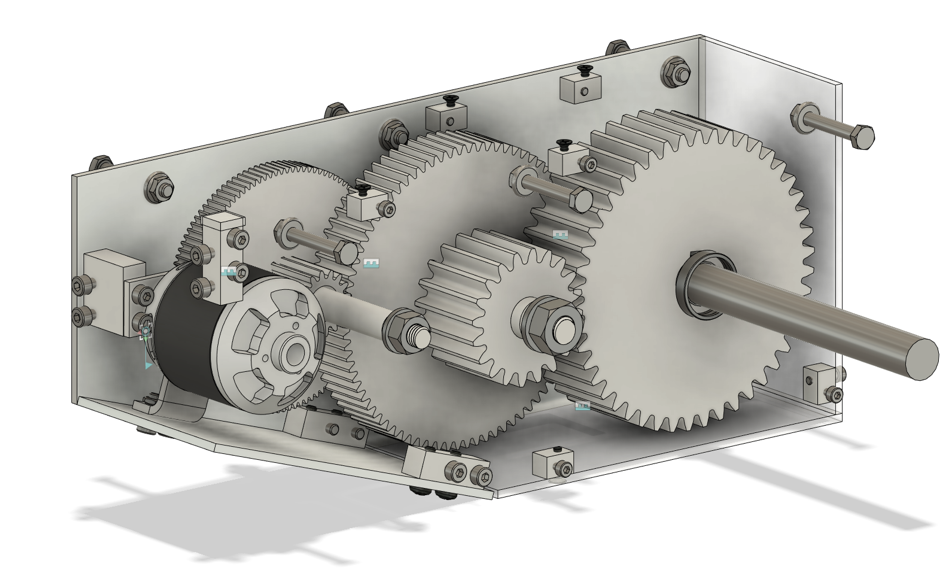
High Torque Electric Vehicle
Created a battery powered brushless motor vehicle weighing less than 10kg capable of pulling a 70kg sled up a slope.
Calculated and constructed an electrical drive system capable of outputting 100Nm at the wheels.
Utilized advanced manufacturing techniques to create precision parts from CNC, laser cutting, 3D printing and lathes.